This note is divided into 4 section.
- Section1: What is the meaning of ‘deep-learning from foundations?’
- Section2: What’s inside Pytorch Operator?
- Section3: Implement forward&backward pass from scratch
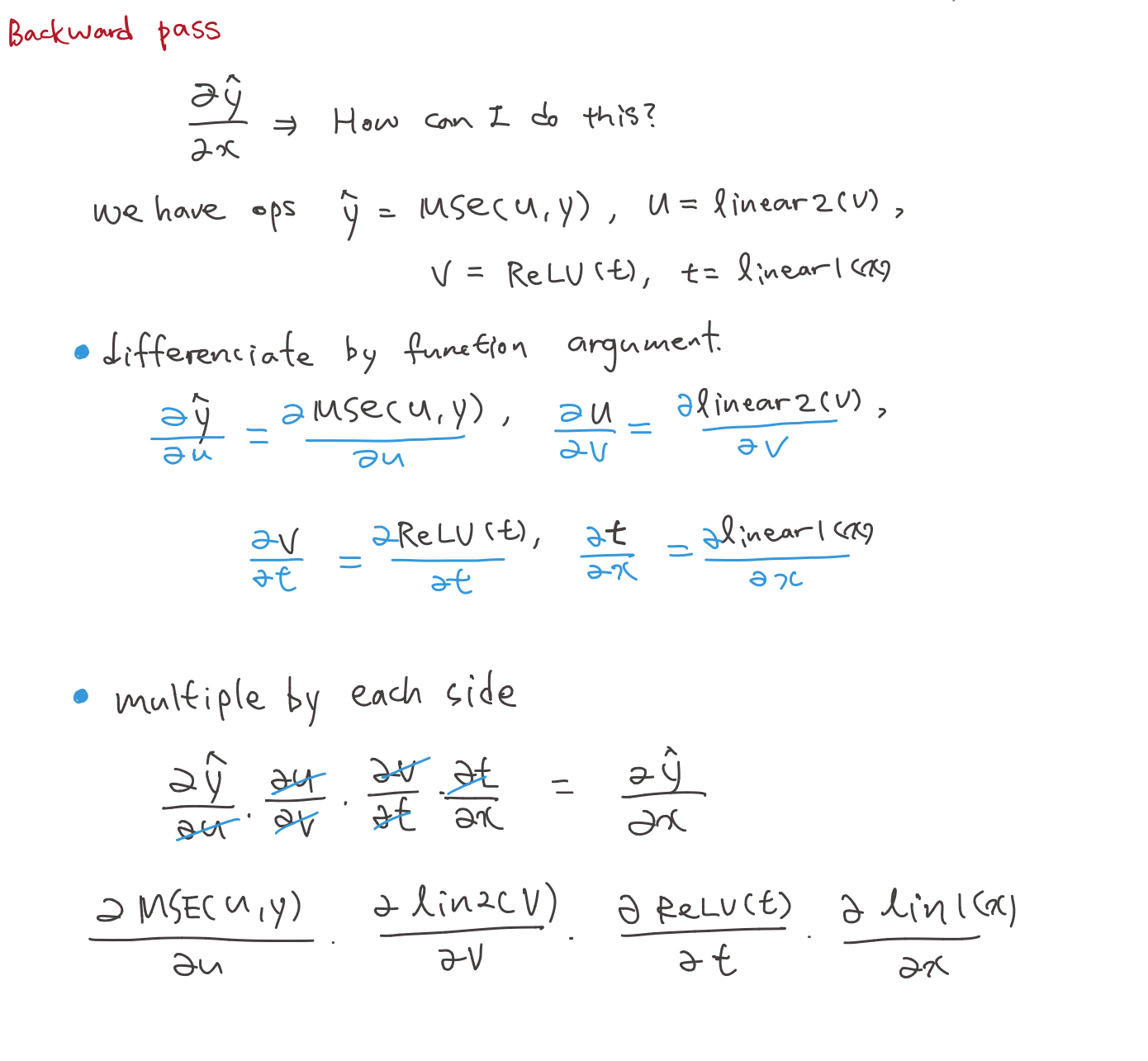
- Section4: Gradient backward, Chain Rule, Refactoring
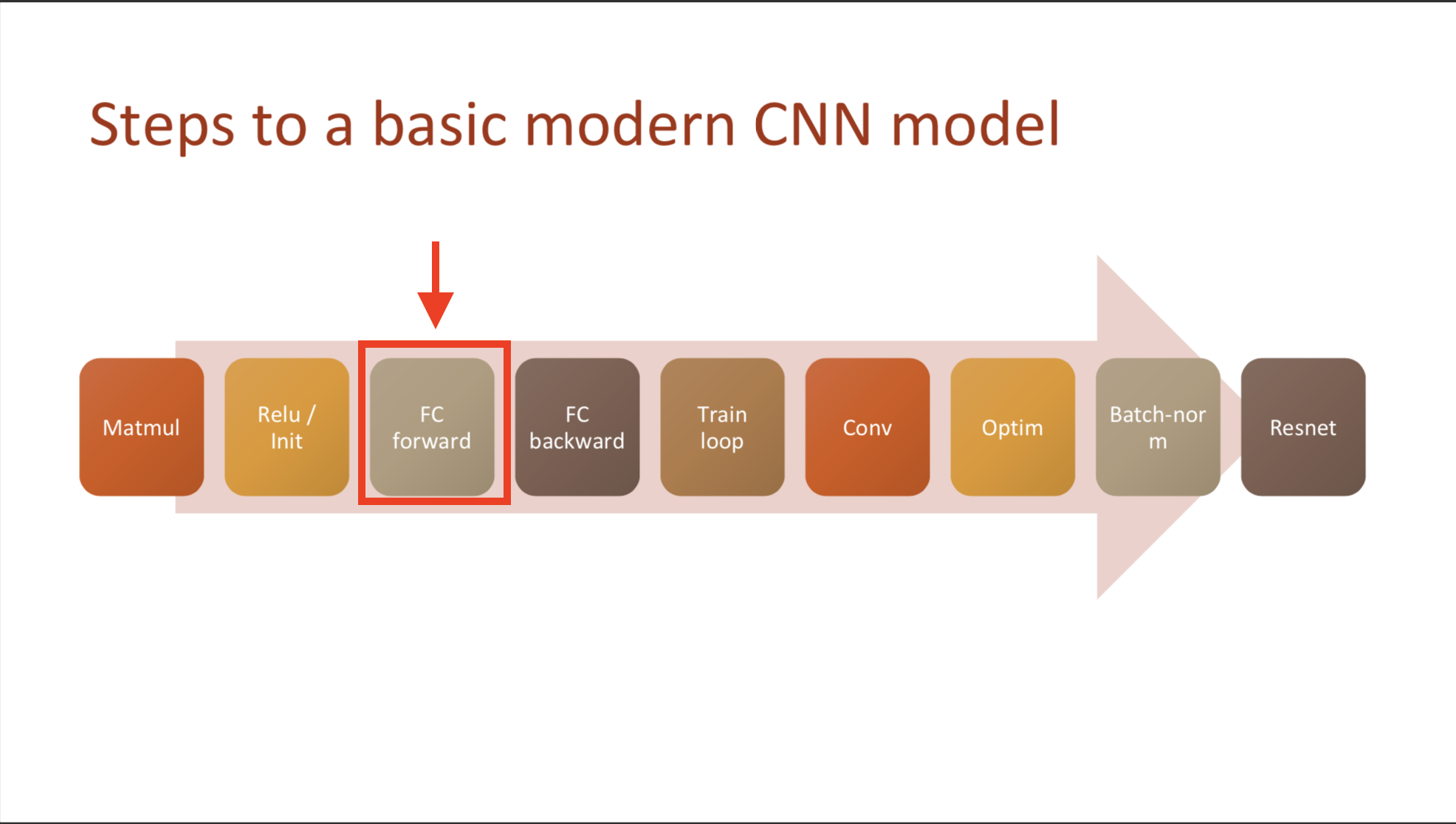
1. The forward and backward passes
1.1 Normalization
train_mean,train_std = x_train.mean(),x_train.std()
>>> train_mean,train_std
(tensor(0.1304), tensor(0.3073))
Remember!
- Dataset, which is x_train, mean and standard deviation is not 0&1. But we need them to be which means we should substract means and divide data by std.
- You should not standarlize validation set because training set and validation set should be aparted.
- after normalize, mean is close to zero, and standard deviation is close to 1.
1.2 Variable definition
- n,m: size of the training set
- c: the number of activations we need in our model
2. Foundation Version
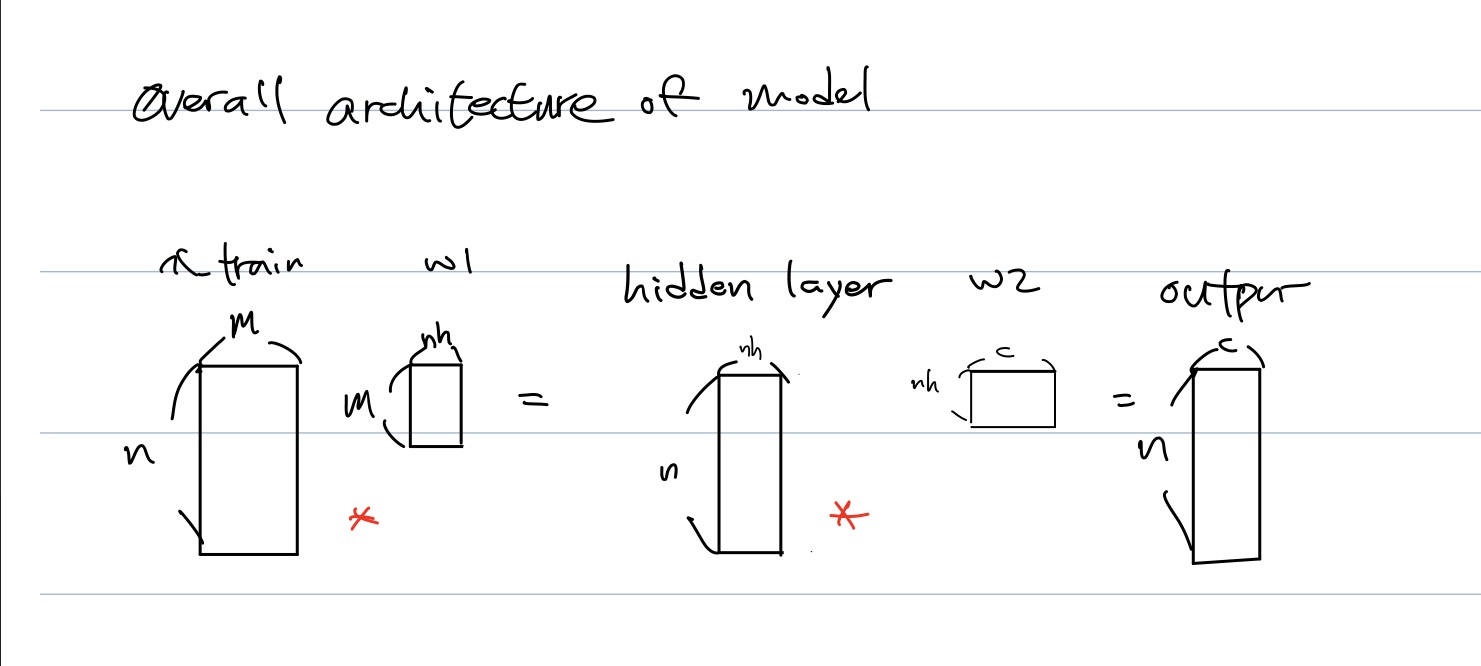
2.1 Basic architecture
- Our model has one hidden layer, output to have 10 activations, used in cross entropy.
-
But in process of building architecture, we will use mean square error, output to have 1 activations and lator change it to cross entropy
- number of hidden unit; 50
see below pic
- We want to make w1&w2 mean and std be 0&1.
- why initializating and make mean zero and std one is important?
- paper highlighting importance of normalisation - training 10,000 layer network without regularisation1
2.1.1 simplified kaiming init
Q: Why we did init, normalize with only validation data? Because we can not handle and get statistics from each value of x_valid?{: style=”color:red; font-size: 130%; text-align: center;”}
- what about hidden(first) layer?
w1 = torch.randn(m,nh)
b1 = torch.zeros(nh)
t = lin(x_valid, w1, b1) # hidden
>>> t.mean(), t.std()
((tensor(2.3191), tensor(27.0303))
In output(second) layer,
w2 = torch.randn(nh,1)
b2 = torch.zeros(1)
t2 = lin(t, w2, b2) # output
>>> t2.mean(), t2.std()
(tensor(-58.2665), tensor(170.9717))
-
which is terribly far from normalzed value.
-
But if we apply simplified kaiming init
w1 = torch.randn(m,nh)/math.sqrt(m); b1 = torch.zeros(nh)
w2 = torch.randn(nh,1)/math.sqrt(nh); b2 = torch.zeros(1)
t = lin(x_valid, w1, b1)
t.mean(),t.std()
>>> (tensor(-0.0516), tensor(0.9354))
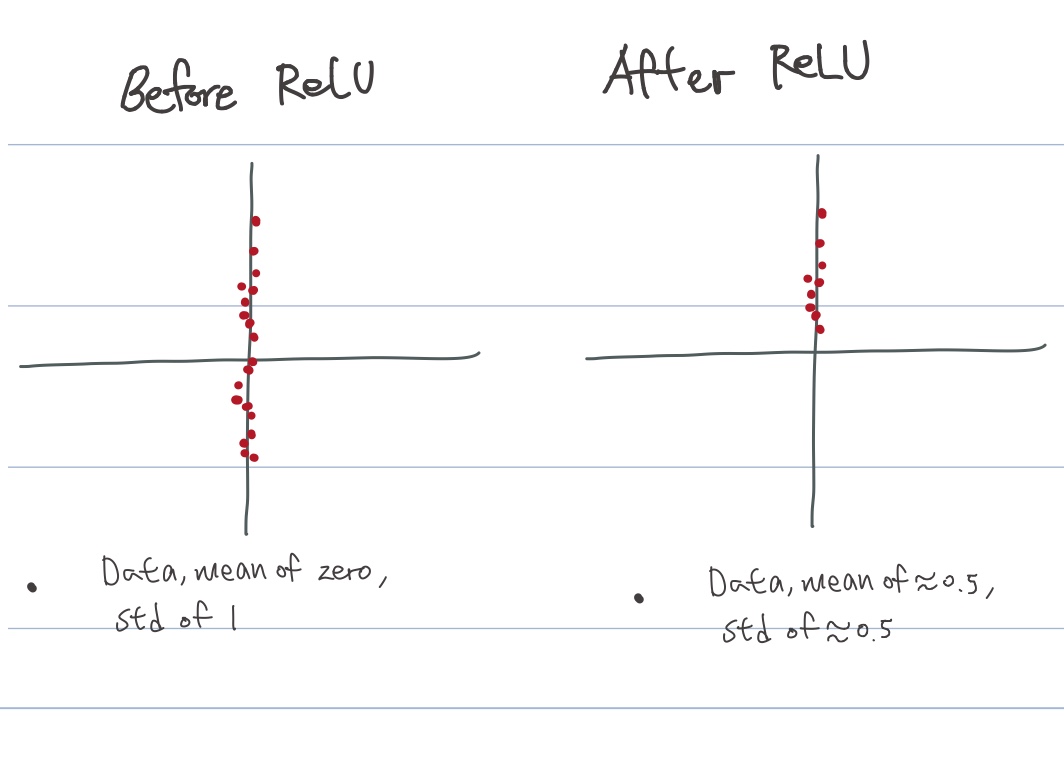
- But, actually, we use activations not only linear function
- After applying activations relu at linear layer, mean and deviation became 0.5.
2.1.2 Glorrot initialization
Paper2: Understanding the difficulty of training deep feedforward neural networks
- Gaussian(, bell shaped, normal distributions) is not trained very well.
- How to initialize neural nets?
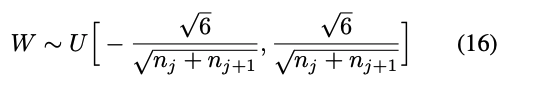
with \(n_i\) the size of layer \(n\), the number of filters \(i\).
- But there is No acount for import of ReLU
- If we got 1000 layers, vanishing gradients problem emerges
2.1.3 Kaiming initializating
Paper3: Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification
- Kaiming He, explained here
- rectifier: rectified linear unit
- rectifier network: neural network with rectifier linear units
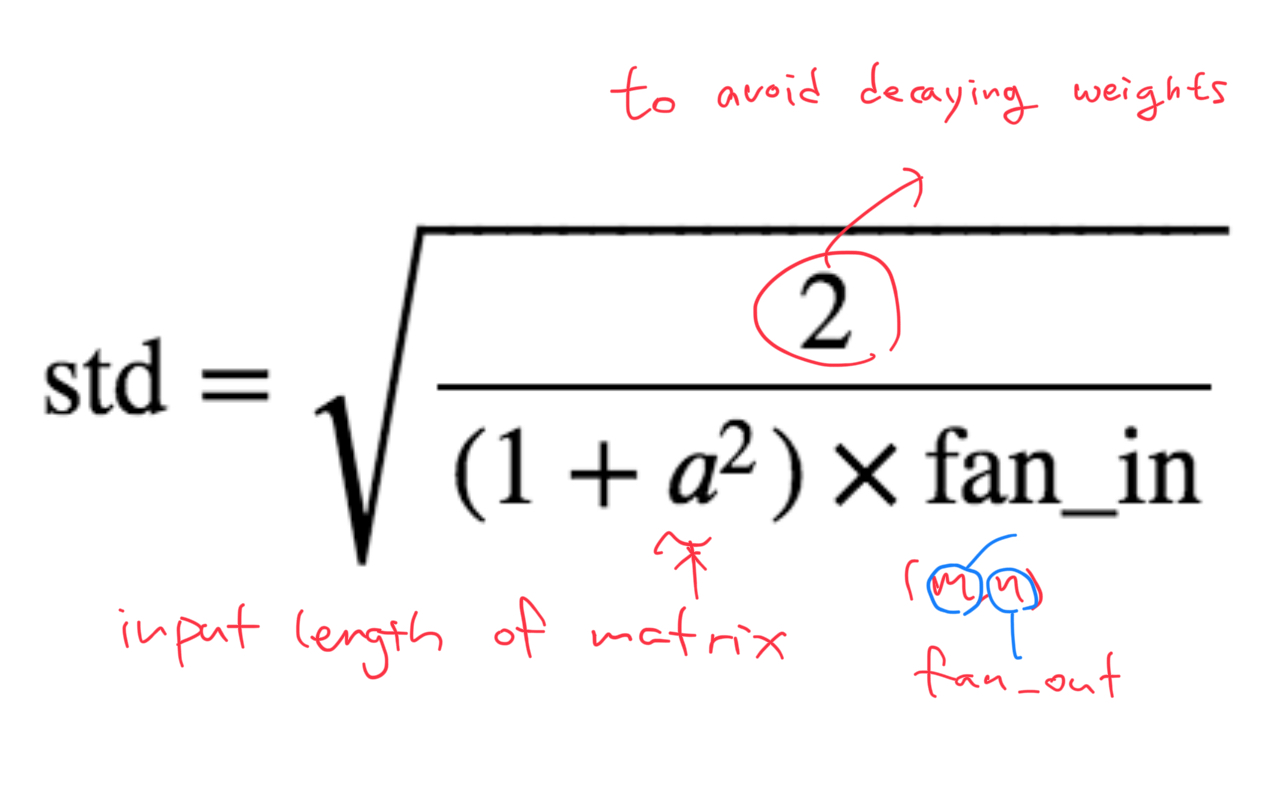
- This is kaiming init, and why suddenly replace one to two on a top?
- to avoid vanishing gradient(weights)
- But it doesn’t give very nice mean tough.
2.1.4 Pytorch package
- Why fan_out?
- according to pytorch documentation,
choosing 'fan_in' preserves the magnitude of the variance of the wights in the forward pass.
choosing 'fan_out' preserves the magnitues in the backward pass(, which means matmul; with transposed matrix)
➡️ in the other words, torch use fan_out cz pytorch transpose in linear transformaton.
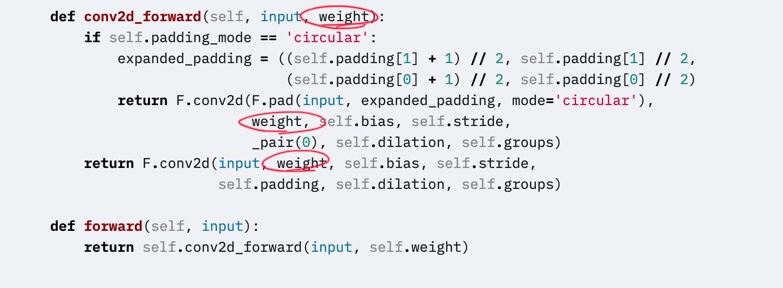
- What about CNN in Pytorch?
I tried
torch.nn.Conv2d.conv2d_forward??
Jeremy digged into using
torch.nn.modules.conv._ConvNd.reset_parameters??
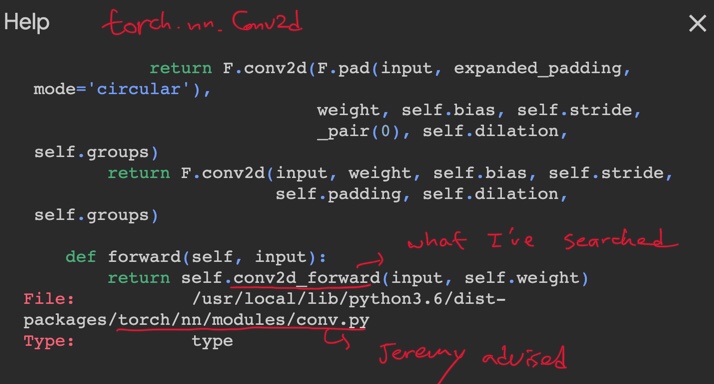
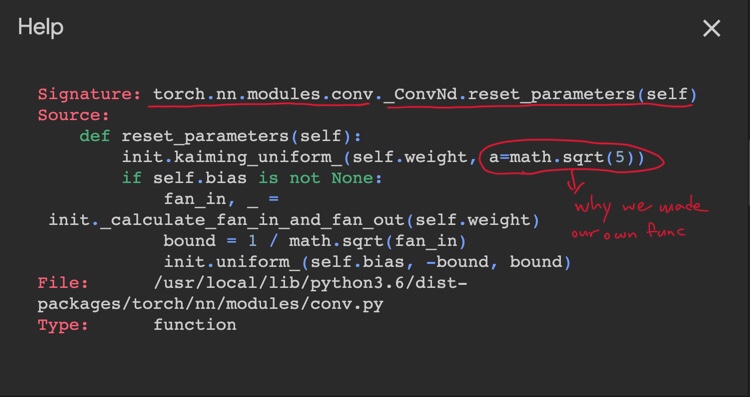
- in Pytorch, it doesn’t seem to be implemented kaiming init in right formula. so we should use our own operation.
- But actually, this has been discussed in Pytorch community before.3 4
- Jeremy said it enhanced variance also, so I sampled 100 times and counted better results.

- To make sure the shape seems sensible. check with assert. (remember we will replace 1 to 10 in cross entropy)
assert model(x_valid).shape==torch.Size([x_valid.shape[0],1])
>>> model(x_valid).shape
(10000, 1)
- We have made Relu, init, linear, it seems we can forward pass
- code we need for basic architecture
nh = 50
def lin(x, w, b): return x@w + b;
w1 = torch.randn(m,nh)*math.sqrt(2./m ); b1 = torch.zeros(nh)
w2 = torch.randn(nh,1); b2 = torch.zeros(1)
def relu(x): return x.clamp_min(0.) - 0.5
t1 = relu(lin(x_valid, w1, b1))
def model(xb):
l1 = lin(xb, w1, b1)
l2 = relu(l1)
l3 = lin(l2, w2, b2)
return l3
2.2 Loss function: MSE
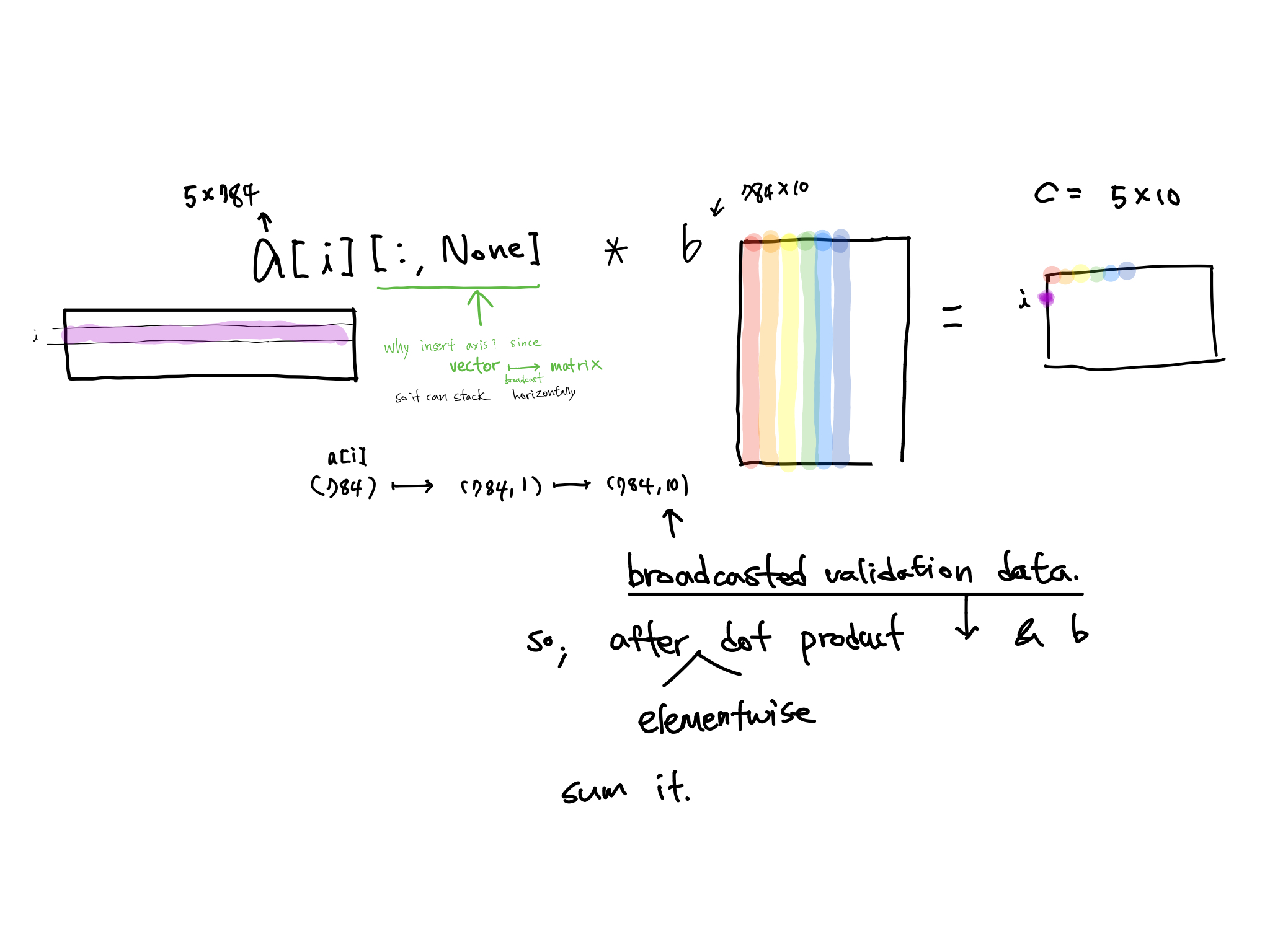
- Mean squared error need unit vector, so we remove unit axis.
def mse(output, targ): return (output.squeeze(-1) - targ).pow(2).mean() - In python, in case you remove axis, you use ‘squeeze’, or add axis use ‘unsqueeze’
- torch.squeeze where code commonly broken. so, when you use squeeze, clarify dimension axis you want to remove
tmp = torch.tensor([1,1])
tmp.squeeze()
>>> tensor([1, 1])
- make sure to make as float when you calculate
But why??? because it is tensor?{: style=”color:red; font-size: 130%;”}
Here’s the error when I don’t transform the data type
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
<ipython-input-22-ae6009bef8b4> in <module>()
----> 1 y_train = get_data()[1] # call data again
2 mse(preds, y_train)
TypeError: 'map' object is not subscriptable
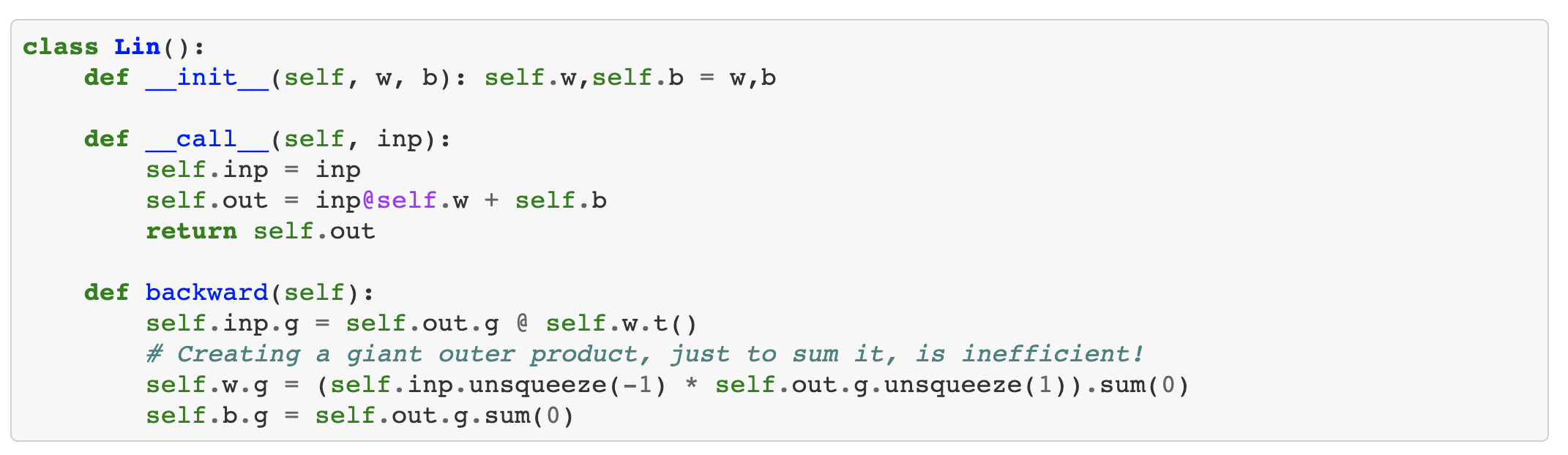
- This is forward pass
Footnote
Other materials
- Understanding the difficulty of training deep feedforward neural networks, paper that introduced Xavier initialization
 What's inside Pytorch Operator?
What's inside Pytorch Operator?