- This note is divided into 4 section.
” Lecture 08 - Deep Learning From Foundations-part2 “
Homework
CONTENTS
- Forward process
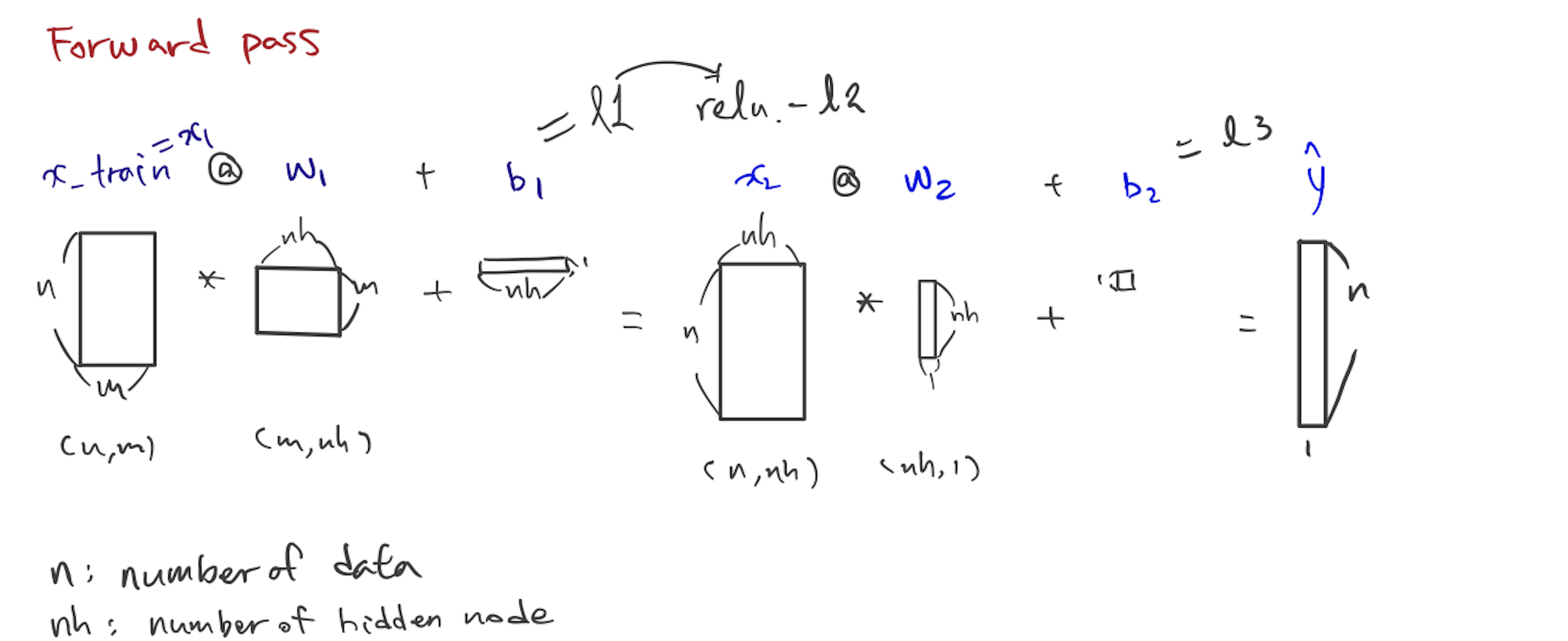
Foundation version
Gradients backward pass
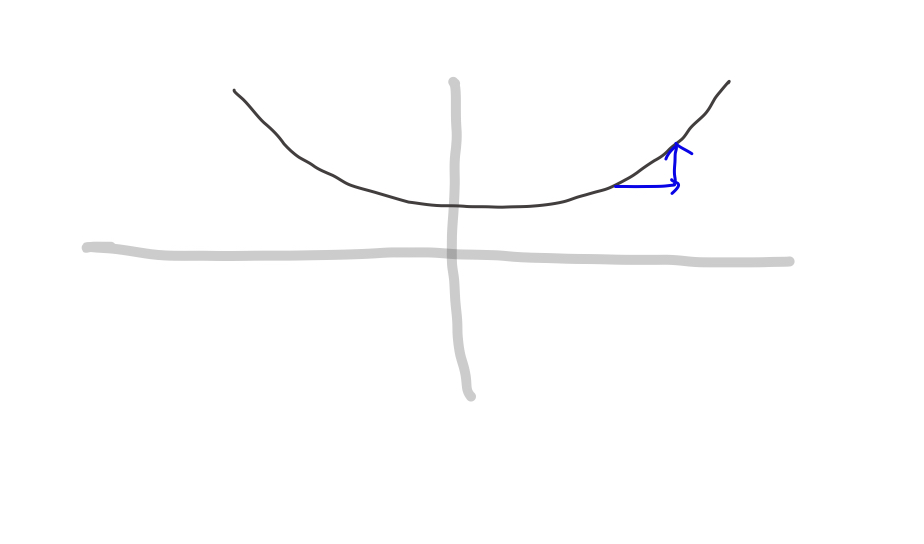
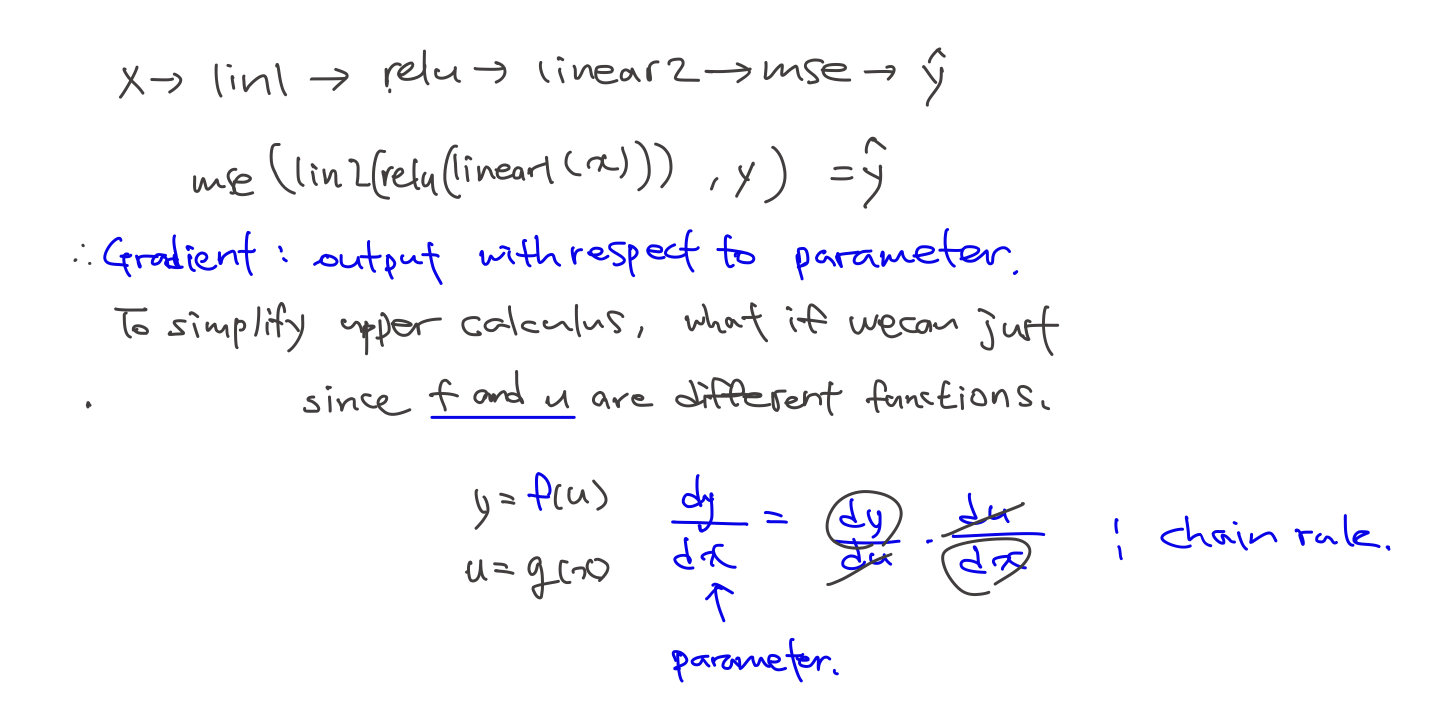
- Gradients is output with respect to parameter
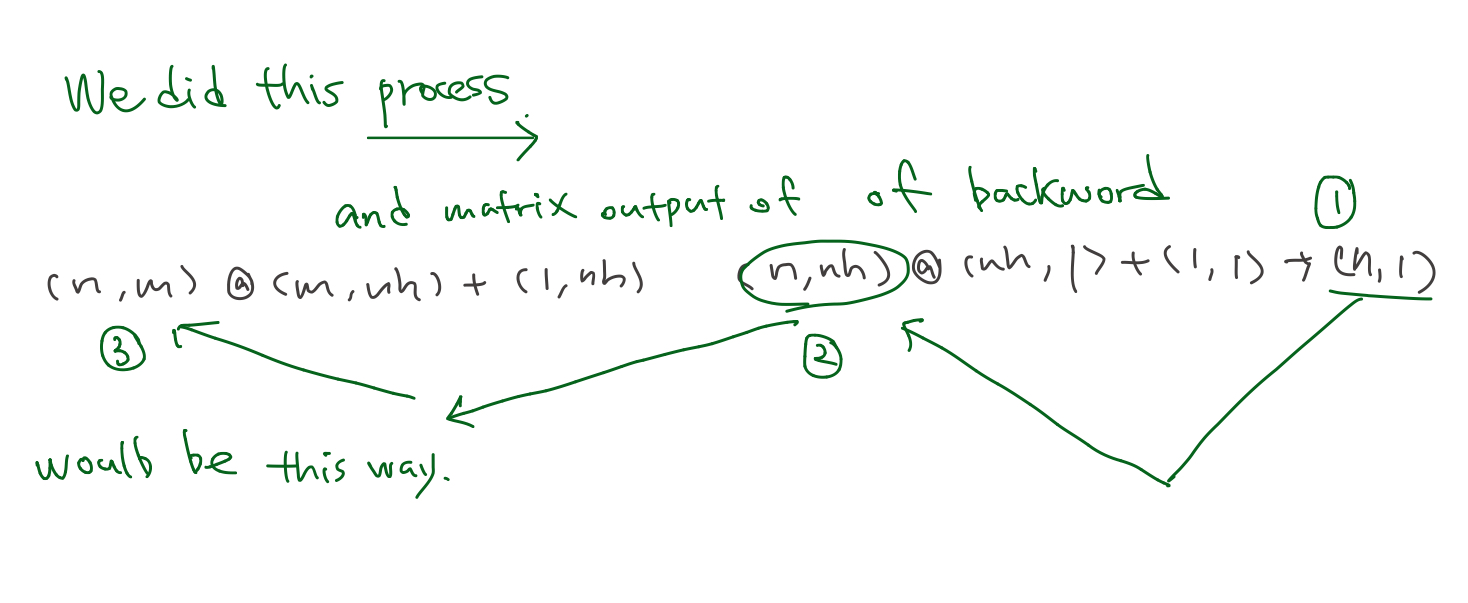
- we’ve done this work in this path(below)
- to simplify this calculus, we can just change it into
\(y=f(u)\), \(u=g(x)\)
- So, you should know of the derivative of each bit on its own, and then you multiply them all together. As a result, it would be over cross over the data.
- So you can get gradient, output with respect to parameter
- What order should we calculate?
BTW, why Jeremy wrote , not Loss function?1
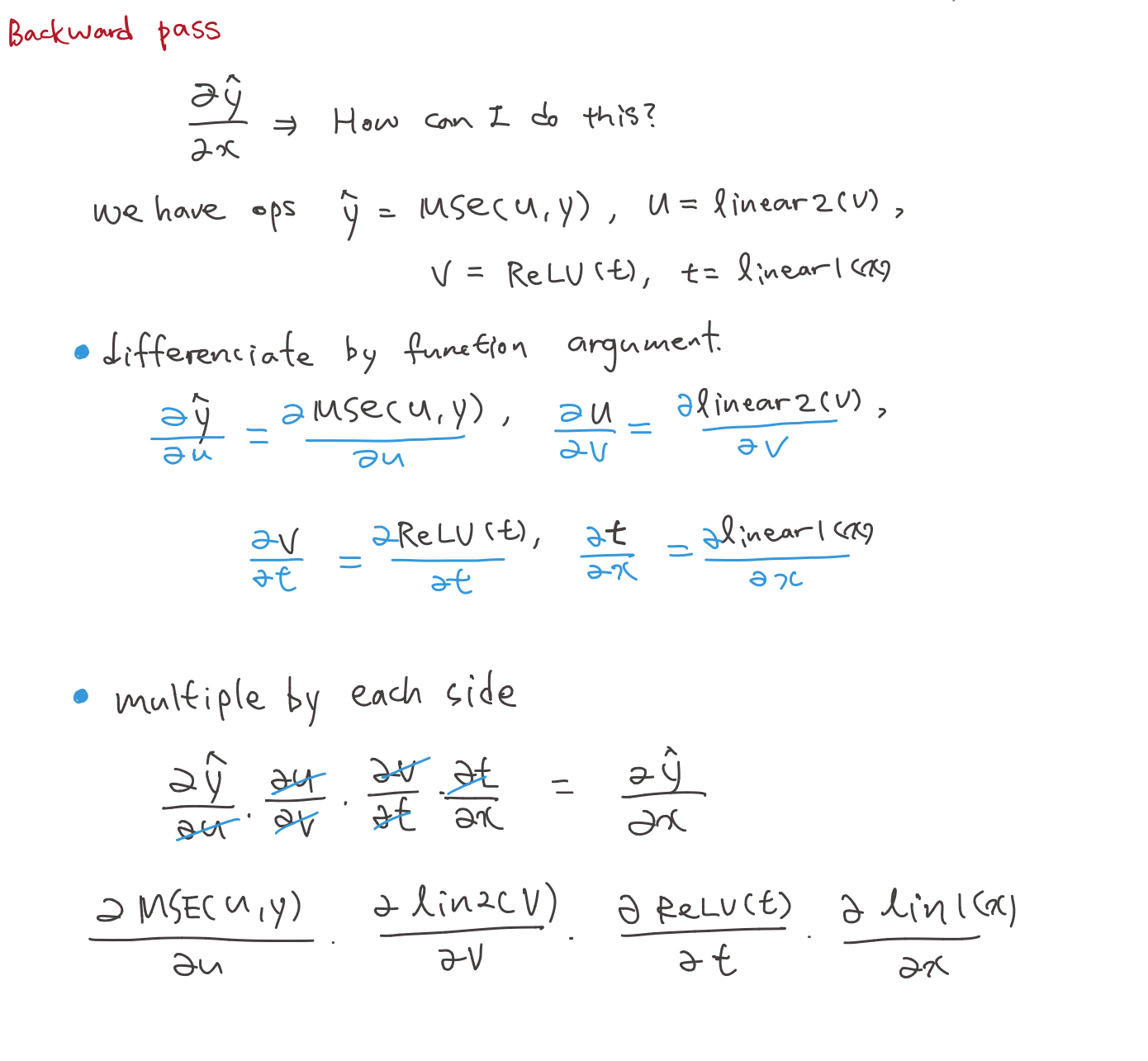
decompose function
- We want to get derivative of which forms
- But, we have a estimation of answer (we call it y hat) now
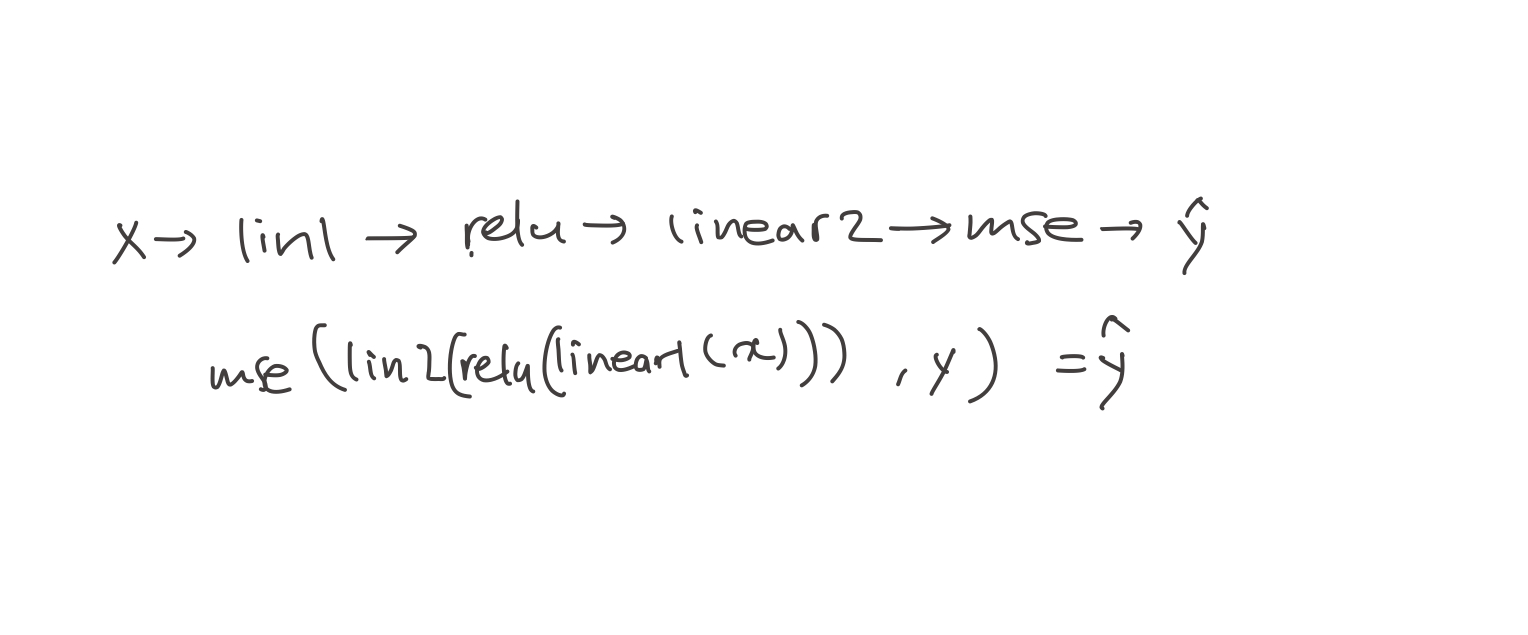
- So, I will decompose funciton to trace target variable.
- Using the above forward pass, we can suppose some function from the end.
- start from , We know MSE funciton got two parameters, output, and target .
- from MSE’s input we know function’s output and supposing v is input of that function,
- similarly, v became output of

chain rule with code
-
examplify backward process by random sampling
-
To get a variable, I modified forward model a little
def model_ping(out = 'x_train'):
l1 = lin(x_train, w1, b1) # one linear layer
l2 = relu(l1) # one relu layer
l3 = lin(l2, w2, b2) # one more linear layer
return eval(out)
- Be careful we don’t use mse_loss in backward process
1) start with the very last function, which is loss funciton. MSE
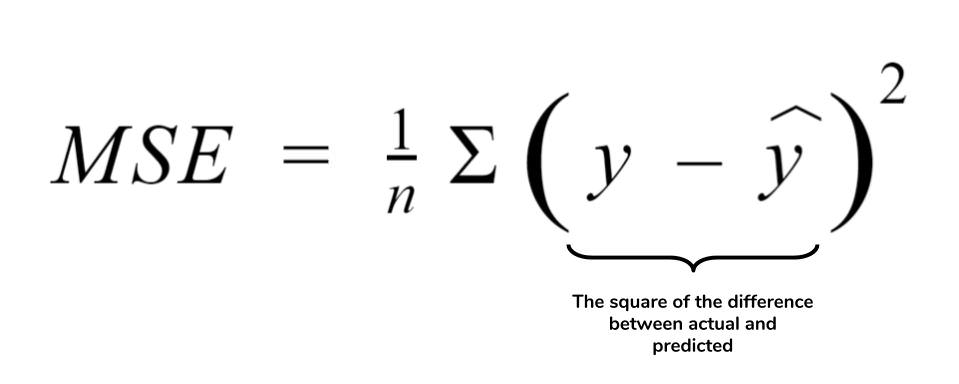
- If we codify this formula,
def mse_grad(inp, targ): #mse_input(1000,1), mse_targ (1000,1)
# grad of loss with respect to output of previous layer
inp.g = 2. * (inp.squeeze() - targ).unsqueeze(-1) / inp.shape[0]
- And, this can be examplified like below.
- Notice that input of gradient function is same with forward function
y_hat = model_ping('l3') #get value from forward model
y_hat.g = ((y_hat.squeeze(-1)-y_train).unsqueeze(-1))/y_hat.shape[0]
y_hat.g.shape
>>> torch.Size([50000, 1])
- We can just calculate using broadcasting, not using squeeze. then why should do and unsqueeze again?
🎯 It’s related with random access memory(RAM).. If I don’t squeeze, (I’m using colab) it out of RAM.
2) Derivative of linear2 function
\[\frac{\partial}{\partial u}MSE(u,y) \times\color{red}{\frac{\partial}{\partial v}l_2(v)} \times \frac {\partial}{\partial t}ReLU(t)\times\frac{\partial}{\partial x}l_1(x)\]- This process’s weight dimensions defined by axis=1, axis=2.
- axis=0 dimension means size of data. This will be summazed by .sum(0) method.
- unsqeeze(-1)&unsqeeze(1) seperates the dimension, and make a dot product, and vanish axis=0 dimension.
def lin_grad(inp, out, w, b):
# grad of matmul with respect to input
inp.g = out.g @ w.t()
w.g = (inp.unsqueeze(-1) * out.g.unsqueeze(1)).sum(0)
b.g = out.g.sum(0)
- Examplified below
lin2 = model_ping('l2'); #get value from forward model
lin2.g = y_hat.g@w2.t();
w2.g = (lin2.unsqueeze(-1) * y_hat.g.unsqueeze(1)).sum(0);
b2.g = y_hat.g.sum(0);
lin2.g.shape, w2.g.shape, b2.g.shape
>>> torch.Size([50000, 50])torch.Size([50, 1])torch.Size([1])
- Notice going reverse order, we’re passing in gradient backward
3) derivative of ReLU

def relu_grad(inp, out):
# grad of relu with respect to input activations
inp.g = (inp>0).float() * out.g
- Examplified below
lin1=model_ping('l1') #get value from forward model
lin1.g = (lin1>0).float() * lin2.g;
lin1.g.shape
>>> torch.Size([50000, 50])
4) Derivative of linear1
- Same process with 2) but, this process’s weight has
def lin_grad(inp, out, w, b):
# grad of matmul with respect to input
inp.g = out.g @ w.t()
w.g = (inp.unsqueeze(-1) * out.g.unsqueeze(1)).sum(0)
b.g = out.g.sum(0)
- Examplified below
x_train.g = lin1.g @ w1.t();
w1.g = (x_train.unsqueeze(-1) * lin1.g.unsqueeze(1)).sum(0);
b1.g = lin1.g.sum(0);
x_train.g.shape, w1.g.shape, b1.g.shape
>>> torch.Size([50000, 784])torch.Size([784, 50])torch.Size([50])
5) Then it goes backward pass
def forward_and_backward(inp, targ):
# forward pass:
l1 = inp @ w1 + b1
l2 = relu(l1)
out = l2 @ w2 + b2
# we don't actually need the loss in backward!
loss = mse(out, targ)
# backward pass:
mse_grad(out, targ)
lin_grad(l2, out, w2, b2)
relu_grad(l1, l2)
lin_grad(inp, l1, w1, b1)
Version 1 (Basic)- Wall time: 1.95 s
Summary
- Notice that output of function at forward pass became input of backward pass
- backpropagation is just the chain rule
- value loss (loss=mse(out,targ)) is not used in gradient calcuation.
- Because, it doesn’t appear with the weight.
- w1g, w2g, b1g, b2g, ig will be used for optimizer
check the result using Pytorch autograd
- require_grad_ is the magical function, which can automatic differentiation.2
- This magical auto gradified tensor keep track what happend in forward (taking loss function),
- and do the backward3
- So it saves our time to differentiate ourselves
- Postfix underscore means in pytorch,
in-placefunction, What is in-place function?
⤵️ THis is benchmark…..
Version 2 (torch autograd)- Wall time: 3.81 µs
Refactor model
- Amazingly, just refactoring our main pieces, it comes down up to Pytorch package.
🌟 Implement yourself, Practice, practice, practice! 🌟
Layers as classes
-
Relu and Linear are layers in oue neural net. -> make it as classes
-
For the forward, using __call__ for the both of forward & backward. Because ‘call’ means we treat this as a function.
class Lin():
def __init__(self, w, b): self.w,self.b = w,b
def __call__(self, inp):
self.inp = inp
self.out = inp@self.w + self.b
return self.out
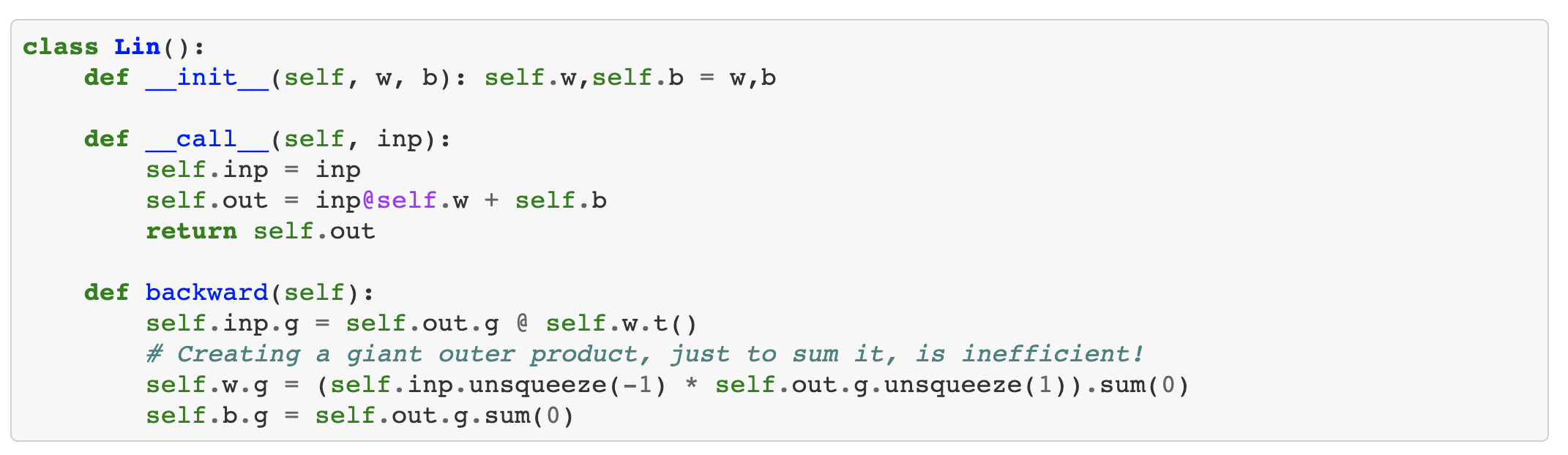
def backward(self):
self.inp.g = self.out.g @ self.w.t()
# Creating a giant outer product, just to sum it, is inefficient!
self.w.g = (self.inp.unsqueeze(-1) * self.out.g.unsqueeze(1)).sum(0)
self.b.g = self.out.g.sum(0)
- Remember that in lin_grad function, we save bias&weight!!!!!
💬 inp.g : gradient of the output with respect to the input.
{: style=”color:grey; font-size: 90%; text-align: center;”}
💬 w.g : gradient of the output with respect to the weight.
{: style=”color:grey; font-size: 90%; text-align: center;”}
💬 b.g : gradient of the output with respect to the bias.
{: style=”color:grey; font-size: 90%; text-align: center;”}
class Model():
def __init__(self, w1, b1, w2, b2):
self.layers = [Lin(w1,b1), Relu(), Lin(w2,b2)]
self.loss = Mse()
def __call__(self, x, targ):
for l in self.layers: x = l(x)
return self.loss(x, targ)
def backward(self):
self.loss.backward()
for l in reversed(self.layers): l.backward()
-
refer to Jeremy’s Model class, he put layers in list
- Dionne’s self-study note: Decomposing Jeremy’s Model class
- init needs weight, bias but not x data
- when call that class(a.k.a function) it gave x data and y label!
- jeremy composited function in layers. x = l(x) so concise…..
- also utilized that layer list when backward ust reversing it (using python list’s method)
- And he is recursively calling the function on the result of the previous thing. ⬇️
for l in self.layers:
x = l(x)
Q2: Don’t I need to declare magical autograd function, requires_grad_?{: style=”color:red; font-size: 130%; text-align: center;”}
[The questions migrated to this article]
Version 3 (refactoring - layer to class)- Wall time: 5.25 µs
Modue.forward()
- Duplicate code makes execution time slow.
- Role of
__call__changed. No more__call__for implementing forward pass. - By initializing the forward with
__call__, Module.forward() use overriding to maximize reusability. So any layer inherit Module, can use parent’s function.
- Role of
- gradient of the output with respect to the weight
(self.inp.unsqueeze(-1) * self.out.g.unsqueeze(1)).sum(0)can be reexpressed using einsum,
torch.einsum("bi,bj->ij", inp, out.g)
- Defining forward and Module enables Pytorch to out almost duplicates
Version 4 (Module & einsum)- Wall time: 4.29 µs
Q2: Isn’t there any way to use broadcasting? Why we should use outer product?{: style=”color:red; font-size: 130%; text-align: center;”}
Without einsum
Replacing einsum to matrix product is even more faster.
torch.einsum("bi,bj->ij", inp, out.g)
can be reexpressed using matrix product,
inp.t() @ out.g
Version 5 (without einsum)- Wall time: 3.81 µs
nn.Linear and nn.Module
Torch’s package nn.Linear and nn.Module
Version 6 (torch package)- Wall time: 5.01 µs
- Final, Using torch.nn.Linear & torch.nn.Module ~~~python
class Model(nn.Module): def init(self, n_in, nh, n_out): super().init() self.layers = [nn.Linear(n_in,nh), nn.ReLU(), nn.Linear(nh,n_out)] self.loss = mse
def __call__(self, x, targ):
for l in self.layers: x = l(x)
return self.loss(x.squeeze(), targ)
class Model(): def init(self): self.layers = [Lin(w1,b1), Relu(), Lin(w2,b2)] self.loss = Mse()
def __call__(self, x, targ):
for l in self.layers: x = l(x)
return self.loss(x, targ)
def backward(self):
self.loss.backward()
for l in reversed(self.layers): l.backward()
~~~
 Implement forward&backward pass from scratch
Implement forward&backward pass from scratch